Identification of Uncertainty Cases in Robots with Focus on Additive Manufacturing Technology: A Mini Review
Ghais Kharmanda1,2*
1Mechanics Laboratory of Normandy, INSA Rouen, Saint-Etienne-du-Rouvray, France
23D printing 4U (UG), Cologne, North Rhine-Westphalia, Germany
*Correspondence to: Ghais Kharmanda, D.Sc., Manager, 3D printing 4U (UG), Nördlinger Str. 10, 51103 Cologne, North Rhine-Westphalia, Germany; Email: Ghais.Kharmanda@3d-printing-4u.com
Abstract
Despite more than three decades since the beginning of Additive Manufacturing (AM), many challenges and issues prevent the industrialization of this technology. In fact, productivity is related to repetitive production of the same part under the same fabrication conditions. Currently, it is difficult to guarantee this repetitive production due to uncertainty issues, which represents the main obstacle of AM industrialization. In this paper, the uncertainty issues can be divided into two levels. The first level is related to the used AM machine itself which can be considered as robot of 3 degrees of freedom (x, y and z). In addition to its movement in three directions, this robot (AM machine) extrudes melted materials. The second level is related to the associated robots with 3D printing machines. In addition to summarizing some previous works and reviews, this mini review has the objective to provide new ideas to develop new strategies to overcome some uncertainty issues to contribute to the industrialization of AM technology. Furthermore, it paves the way to establish a concurrent AM / robotics loop in order to use AM for robotics and robotics for AM. The different developments should lead to elaborating Industrialization Standard for AM (IS4AM) where the different findings and recommendations can be classified in logical ways to deal with different AM techniques and materials.
Keywords: uncertainty, robot, additive manufacturing
1 INTRODUCTION
In Additive Manufacturing (AM), the high failure rate represents a big issue leading to high costs and limiting the productivity levels[1]. In addition to the productivity limitation, the quality and / or the functionality of the additively manufactured products may be affected due to the existence of certain defects and / or faults. So, there is a need to use advanced techniques to control different AM stages (design, process, product and environmental surrounding)[2,3]. These outputs can be considered as a big obstacle to industrializing this technology. In addition, it is important to seek controlling AM technologies in a sustainable manner[4]. In practical AM operations, when a failure case occurs between two successful AM processes, it can be called an uncertainty failure case or a failure case under uncertainty where it is difficult to know exactly the behind causes[5]. To solve this problem, different uncertainty cases should be first identified and after that failure causes should be logically analysed. This way, suitable maintenance actions can be taken in order to reduce the likelihood of failure. The identification of uncertainty is carried out at two levels: The first level is related to the AM machine which can be considered as a multifunction robot. The second level is related to the associated or used robots with AM machines (performing surveillance, carrying out printed parts…). For the first level, failure cases under uncertainty can occur due to unknow reasons. This means that for the same design and the same applied manufacturing conditions, it is possible to get a failure case between two successful printing cases[5,6]. This leads to defect / fault / failure cases. However, for the second level, uncertainty can be related to accuracy and / or obstacle existence. This way, uncertainty should be understood considering two types of robots: manipulator and mobile robots[7,8]. For example, failure can happen due to inaccurate trajectory or localization (mobile robots) or / and when gripping the final manufactured parts (robotic manipulators).
On the one hand, mobile robots which are currently utilized in many intralogistics operations, such as manufacturing, cross-docks, warehousing, terminals, and hospitals, can react in a dynamic way according to the environmental changes (dynamic environments)[9]. During the last decade, several reviews can be found in literature dealing with the different issues such as localization, trajectory generation and tracking. For example, Zafar and Mohanta[10] addressed the problems mainly being on path planning algorithm and optimization in static and dynamic environments. Their review has been carried out in the broad field of mobile robotic research, especially concentrating on the path planning in several cluttered environments. Next, Patle et al.[11] presented an accurate study of navigation techniques used for mobile robot. In their review, step-by-step analyses of classical and reactive methodologies are carried out with the object of understanding the path planning strategies in several environmental conditions and also identifying research gaps. After that Fragapane et al.[9] provided an extended literature review to highlight the effect of the technological advances of the mobile robot on planning and control decisions. Recently, Yang et al.[12] presented a review for designing optimal paths from starting points to destinations within specific environmental conditions.
On the other hand, we have robotic manipulators which are also increasing in different areas such as electronics, plastics, wood, consumer goods, and food but they are still mainly utilized in automotive industry[13]. They are utilized in several industrial applications to make tasks easier or decrease the different risks due to tasks deemed dangerous, difficult, or impossible for humans. These robotic manipulators can be equipped with several kinds of end effectors with the object of carrying out various tasks. One of the most used robots ends of arm tools are grippers which can be varied according to the application in hand for the robotic systems. Therefore, the gripper selection is a very important aspect at the design stage. When dealing with robot gripper classifications, there are no sufficient research papers[14]. During the last decade, a first review was carried out by Hughes et al.[15] where different methods and materials, sensors and actuation methods being utilized in the soft manipulator’s developments, were evaluated. Their review was concluded by a discussion on the potential impacts of soft manipulator effects on society and industry. After that, a brief review on different categories of grippers was elaborated by Samadikhoshkho et al.[14], where the goal was to provide a brief informational summary on different gripper classifications considering that the gripper selection plays a vital role in the efficiency and performance of robot manipulators. Furthermore, Zhang et al.[16] provided a detailed summary about the state-of-the-art of the robotic grippers where robotic sensor-based control methods and grasping processes were summarized. Next, Surati et al.[17] referred several research papers having been experimentally verified where the different used controllers types and different methodologies used by different authors were provided to decide the degrees of freedom of a manipulator used for the picking of an object and placing it at specified position. After that, Hernandez et al.[18] provided a comprehensive review of robotic arm grippers with the object of identifying the advantages and disadvantages of several designs. The research compared gripper designs by considering degrees of freedom, actuation mechanism, grasping capabilities with multiple objects, and applications. Recently, AboZaid et al.[19] presented a review for investigating how soft grippers can contribute to reducing cost and enhancing production efficiency while addressing practical relevant solutions. So, research on uncertainty in AM and robotics is critical due to the difficulty of determining the exact causes of failure cases under uncertainty. For example, a small deviation of an operating parameter (ex. localization, temperature, speed…) may lead to a failure case which leads to a waste of time and materials.
In the following sections of this mini review, we present uncertainty concept and next relate its existence to AM and robotics. This way, it is the objective to address uncertainty in AM to avoid or reduce unexpected defect / fault / failure cases, while in robotics to prevent or decrease failure cases. After that we present the most probable difficulties and issues and provide some solutions to overcome failure cases due to uncertainty occurred in AM and robotics through comparing our propositions and strategies with other works and developments such as MathWorks team in order to provide the reader with effective future perspectives and steps for the industrialization of AM technology. In addition to this objective, we provide some ideas to integrate uncertainty concept into robotics where there is a strong need when performing dangerous and remote tasks with reduced likelihood of failure. Therefore, as a future perspective, a concurrent AM / robotics loop can be constructed by using advanced AM techniques to fabricate robot parts and using the built robots to increase the performance of the AM products.
2 UNCERTAINTY CASES
Uncertainty can be defined as impossibility to describe exact future outcomes due to an existing limited knowledge[20]. In this case, information about the failure modes is hardly available, which can happen in the design and / or the process[21]. Two major risk origins can be related to the uncertainty. The first category of risks may affect the product quality, are essentially related to operational stresses (internal forces, movements, etc.) and quality constraints (material properties, quality of surface, the measurement precision, etc.). These risks are called intrinsic risk or operational constraints. While the second category of risks is mainly related to the environment and can be originated from climatic stress (temperature, pressure, humidity, etc.) and mechanical stress (loading, forced deformation, etc.)). These risks are called extrinsic risks (quality constraints)[22]. During the manufacturing process, the use of low-quality raw materials can be considered as intrinsic risks, while high humidity level can be considered as extrinsic risks in certain types of production. Both kinds of risk may affect the product quality and the production process itself. For more detail, the interested reader can find in[5], several components of uncertainty categorization such as its dimensions, types, classes, and models.
2.2 Uncertainty in Robotics
Uncertainty should be carefully treated, especially when dealing with dangerous or faraway tasks. For example, Arribas[23] presented a strategy for developing Mars Sample Fetch Rover. The rover's role is to autonomously drive and pick up samples left by the Perseverance rover on the Mars surface. The author focuses on the robotics at the front of the rover (camera systems and robotic arm) that are used to identify, grasp, and stow these samples (without human in the proposed loop). On the other hand, diverse customer needs have led to an increase in the demand of a wide variety of products, services, and solutions. Creating a human-robot coworking environment to satisfy these customer needs requires a flexible robotics system configuration. Current robotic systems can be inflexible because robots are typically designed to carry out predetermined actions based on specific instructions. Thus, flexible robotics movement can be performed in various products, tasks, services, and solutions. Furthermore, the effectiveness and the reliability of used monitoring systems (sensors...) should be highly considered. For example, when using an ultrasonic sensor for distance measurement as a monitoring component, it is possible to send out a short sound pulse to detect a position of certain objects. A developed algorithm helps in guiding the robot in an accurate way to attend the planned goals and / or to avoid obstacles. Ono[24] introduced some developments of a robot hand which incorporates multiple sensors. The robot hand and its controller were designed and verified using Model-Based Design (MBD) with MATLAB and Simulink. Development of advanced driver assist systems and autonomous driving applications often depends on simulation to reduce in-vehicle testing. Using their workflow, it is possible to quickly author and simulate scenarios to gain system insight and test the user’s designs[25]. In robotics, Deep Machine Learning (DML) allows significant processes to perform tasks related to the perception. And Reinforcement Machine Learning (RML) has shown the potential to solve some real hard control problems. RML should be integrated to reduce the different effects of uncertainty issues.
2.3 Uncertainty in Additive Manufacturing
Several sources of uncertainty can be found when executing the AM processes. So, the different risks due to uncertainty should be evaluated to find the suitable reactions to prevent occurrence of any probable problem (defect, fault, failure…). For example, when uncertainty issues occur in geometric models, an imperfection of manufacturing process can result where certain deviations with respect to the geometry as it was imagined can arise[26]. Another uncertainty type can be found in material properties. Indeed, the materials properties are associated with several parameters like the extrusion, the construction direction, and the orientation. This kind of uncertainty problems also affect the manufacturing cost. It is therefore essential to define a suitable framework to resolve these problems to arrive to efficient AM[27,28]. There are generally several types of uncertainty to analyse. In our previous study, thermal uncertainty was studied in the context of preheating in the AM process[29]. Here, preheating plays an important role in the fixation of the first layer on the build platform. It is recommended to increase the preheating temperatures of the extruder and the build platform to certain thresholds according to the used material and design. However, failure cases under uncertainty can occur despite using same prescribed preheating values when manufacturing same products[29]. All these kinds of uncertainty should be considered when industrializing AM technology.
3 DIFFICULTIES AND PROPOSITIONS
Nowadays, robotic manipulators are used in many industrial applications to increase efficiency, productivity, precision of the different operations and also minimize human errors. One of the most important advantages of introducing robotic manipulators in industrial applications is that it can work in crucial conditions like high pressures, temperatures where it’s risky for humans to work[17]. For example, gripper-equipped robots which are used to carry out many tasks, are usually associated with the human hand. This allows us to use grippers in a wide application range. Depending on the application, an ideal gripper design should be energy-efficient, affordable, and adaptable to many situations. However, regardless of the big number of available grippers, there are still many tasks where it is difficult to use grippers. So, there is a need for new designs to participate with the human hand[18]. In addition, the gripper type plays an important role in gripping performance[30] where different uncertainties can be associated with each type. A robotic manipulator can be equipped with different types of end effectors to perform diverse tasks[14].
When dealing with remote and / or dangerous tasks, uncertainty should be carefully treated in order to reduce the likelihood of failure. In AM, some used materials can be considered toxic materials. So, there is a need to use robots to participate in performing several tasks. Furthermore, according to our experience with PLA material (Polylactic acid) which is considered as non-toxic material[31], we found that there are some effects for the human body (ex. breathing, digestive systems). It is true that PLA has less toxicity levels than other polymers[32], however its toxicity levels increase when increasing temperatures and printing time. In addition, the problem becomes more complicated when manufacturing composite PLA materials, especially when mixing PLA with wood fibers. So, there is also a need to use robots to help in carrying out certain operations, especially for long printing operations. Furthermore, failure cases can lead to several kinds of problems: waste of materials and time, damage to certain machine parts, safety problems… An advanced monitoring system is needed to detect the failure signs at the early stages. Figure 1 shows the development of the failure signs (on the same machine) starting from Acceptable Failure Sign (AFS) as shown in Figure 1a to an Unacceptable Failure Sign (UFS) as shown in Figure 1B. Figure 1C shows a Significant Failure Sign (SFS) leading to a failure case because of the sign development without performing any actions to solve this problem. In Figure 1A and 1B, the printing operations continued to the final products, while in Figure 1C, a failure case occurred before the end of the printing process.
|
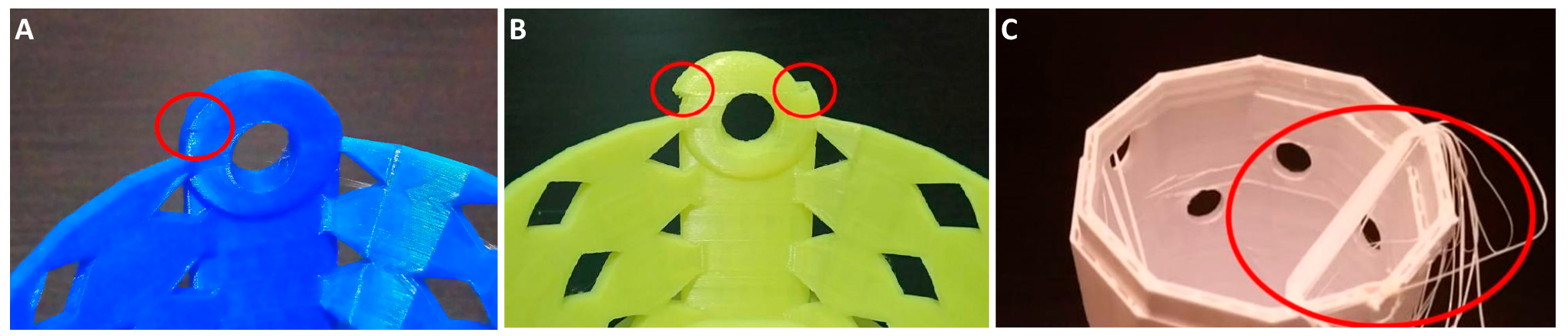
Figure 1. Development of failure signs, (A) AFS, (B) UFS, and (C) SFS leading to failure case.
Here, we used pure PLA material by FFF (Fused Filament Fabrication) or FDM (Fused Deposition Modelling) as an AM technique for fabricating the different additively manufactured parts in Figures 1 and 2. For this used FFF technique and PLA material, we found that the evolution of the failure signs from acceptable to significant levels can be related to different parameters such as position stability of build platform which can be a subject of uncertain movement errors as shown in Figure 1B. Furthermore, it can be due to the existence of edges (Figure 2A) where the applied forces may lead to a part separation of the first layer of the raft as shown in Figure 2B, leading to a significant sign of failure as shown in Figure 1C. Certain cases can be generally classified as uncertainty cases since they may happen between two successful printed components (or products) due to uncertain movement of the build platform and / or other operating parameter deviations. In order to know the time scales for the progression of failure signs, a printing machine should be used several times for the same design and materials, while our used machine is used to produce several kinds of products. In addition, the scale of failure signs (AFS, UFS or SFS) depends on the use of final products. For example, decorative models are so sensitive to these defects. In this case, the product can be easily rejected by the customer even for a small defect, which leads to a waste of time and materials (high cost), especially when mixing PLA with other materials such as bronze powder. Here, there is a need to apply Six Sigma principles in order to meet the customer’s satisfaction[33], which leads to highly improving the product quality.
|
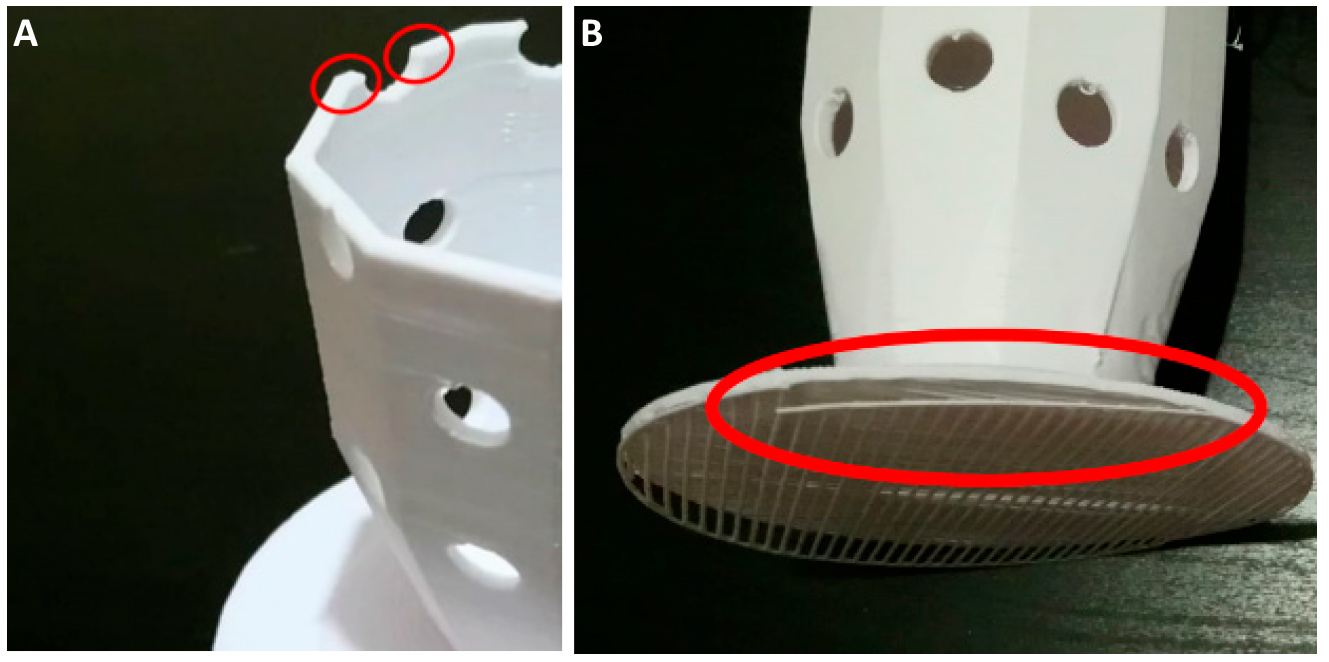
Figure 2. Reason and consequences of uncertainty failure case: (A) Existence of edges leading to a part raft separation, and (B) Separation of the first raft layer.
It is also important to mention that in certain product types such as orthodontic models[31], these signs (Figure 1A and 1B) themselves can be considered as defects / faults in the final products. In this way, Preventive Maintenance (PM) actions such as lubrication, cleaning, replacement… should be scheduled to prevent the failure occurrence and even to prevent the appearance of failure signs. Several challenges such as visualization and precision may appear during this detection. Effective strategies related to machine and process surveillance should also be developed. All these recommendations can be collected in an Industrialization Standard for AM (IS4AM) considering several AM techniques such as FFF. This IS4AM should provide a suitable roadmap (prerequisites, operating conditions and other requirements) for manufacturing certain materials by using certain AM techniques. For example, due to their simplicity, pure PLA materials using FFF technique can be the first industrialized AM subject of this future standard to be handled.
When using robots for AM, development of optimization algorithms can be needed to optimize the workplace with the object of avoiding any probable collisions during the different processes. For the used assembled robot in Figure 3, we deal with uncertainty regarding two levels: The first level concerns the accuracy of robot trajectory. Here, compact bipolar stepper motors (0.9°/step) are used to give higher precision and smoother movement, which lead to a good accuracy when comparing to the previously used DC-motors with gearboxes (gear ratio of 1:48, approximately 200rpm). This kind of motors need to used encoders and to develop the corresponding complicated code to deal with accuracy problems. Here, the uncertainty issue due to accuracy is solved by simply using stepper motors, while the uncertainty due to existence of an obstacle needs a monitoring system controlled by advanced AI (Artificial Intelligence) techniques such as RML. The second uncertainty level concerns the manipulator which is used for gripping objects. Figure 3 shows two gripping processes: The first one represents a successful gripping process, while the second one represents a failed gripping process. This case may damage the gripper and its components (Servo Motor (SM), articulation systems…). Uncertainty can be found in localization and / or jaws themselves. For localization, it is possible to increase the reliability levels using advanced monitoring systems, while for jaws, there can be a real problem in evaluating their effectiveness. So, the existence of uncertainty here needs also to be treated by using RML as an advanced AI technique to control the whole gripping process. In the used simple robot (Figure 3), Arduino UNO is used as the brain of the robotic manipulator and mobile robot, simple ultrasonic sensors are utilized to detect the localization of the object. Before integrating any kinds of AI techniques, there is a need to use force sensors at the gripper for finding the suitable force which should be applied on the gripped object. Furthermore, potentiometers should be used at the joints for detecting the position of the motor shaft. Figure 3A represents a successful gripping process, while Figure 3B shows a failed gripping process. Here, we can identify the cases of failure and the consequences as well according to our observation. The main cause is related to the localization of the jaws. The picked piece should be located at the middle position in the Horizontal Direction (HD) between the two jaws and at a suitable position in the Perpendicular Direction (PD). In the case of wrong localization (certain deviations), the used gripping function will be performed without picking any pieces as shown in Figure 3B. For example, a small localization error due to human factors may lead to failing the gripping process. Here, there is a need to use an advanced monitoring system to provide flexibility in determining the suitable position of the jaws. Certain shocks can happen and damage the SM after a few failed trials, which can be considered as a main consequence of this failure case regarding less the other delays (shutdown time). According to our experience, the risk of this SM’s damage increases when creating unsuitable gripping functions (ex. with rapid gripping process) where a shock can occur during jaws’ placing. During the programming, these kinds of gripping functions can be created in a simple way to perform a required task in a certain time without taking obstacles or other uncertainties into account. This may lead to several damages especially when uncertainty problems appear (existence of an obstacle, deviation in trajectory…). Therefore, localization control is needed to avoid any shutdown time and additional costs. In literature, several algorithms have been developed to use collaborative robots for obstacle avoidance[34], while we propose here to implement advanced AI techniques such as RML to avoid existing obstacles and also to correct the trajectory when it is needed. In addition, soft robotic grippers should be developed to meet this kind of difficulties[19]. Furthermore, it is important to carry out a rational selection of reliable gripping systems for specific production such as AM type which can be very helpful to industrialize this technology[35]. More developments can be carried out for improving the performance of mobile robots with the object of obtaining optimal path plannings[36], which can be highly recommended when serving several AM machines.
|
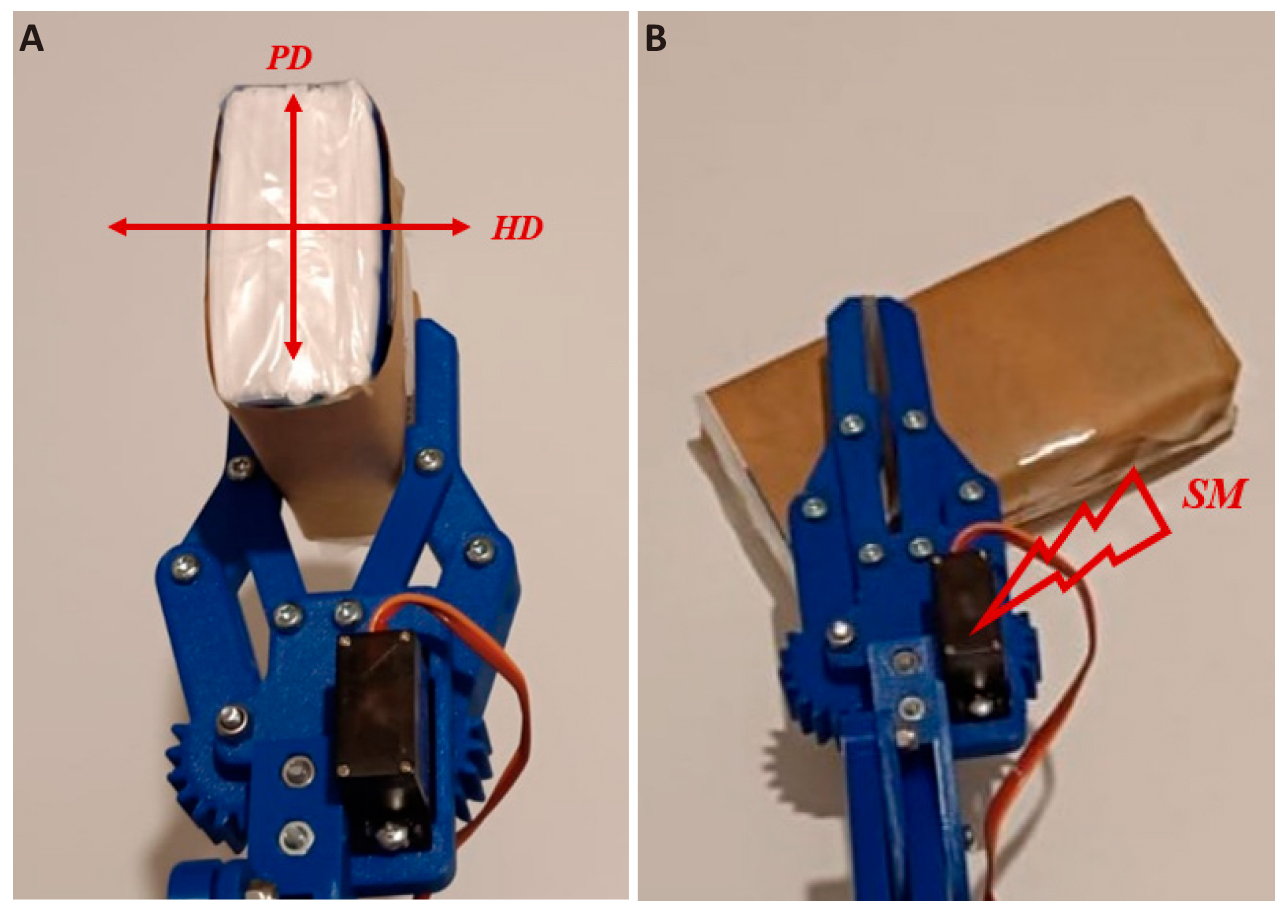
Figure 3. Gripping Processes: (A) Successful and (B) failed gripping processes.
Another problem appears when handling suspicious objects which could be hazardous in its present environment and workplace[37]. In this way, it is possible to use an MBD strategy developed by MathWorks to solve this kind of problem. Their different toolboxes can be helpful to solve some problems considering the limitations of their capabilities[38]. This model contains two main stages: modeling stage where the user can try out new ideas and perform fast repeatable tests through simulation and analysis processes. While the second stage called automation stage where the objective is to eliminate manual steps and human errors through coding and verification processes. According to our best of knowledge, in MathWorks tools, uncertainty is not considered in their robotics works and developments. So, we propose to develop new codes to include the uncertainty concept to overcome the different resulting problems. However, it is important to mention that the developments by MathWorks are very advanced at the modeling level which leads to low cost, rapid iterations and continuous design improvements when comparing with physical prototyping. Furthermore, in certain industries where the environment is prone to a lot of disruptions, there is a need to deal with intelligent control systems[13], while in AM, it is not the case. So, it is possible to develop our own hardware.
This kind of research is a multidisciplinary work where several constraints should be considered to define the best compromise between several objectives. A similar combination can be found in the food industry where several requirements such as variable nature of food products, fragile and perishable characteristics of food items, hygienic and sterilization requirements, are needed for cost reductions and flexibility[39]. All these academic and industrial experiences should be taken into account in order to develop an effective tool. It is recommended that robotic control research can advance more rapidly if robotic manipulators of valuable performance were highly reduced in price[37]. Some strategies are suggested to take uncertainty concept into account in order to reduce the probability of failure during the manufacturing process. As future works, FMEA (Failure Modes and Effects Analysis), FMECA (Failure Mode, Effects and Criticality Analysis) and Six Sigma strategies can be integrated to improve the use of this technology. Finally, to overcome certain issues, advanced strategies based on artificial intelligence[17,40] can be also used to provide high control levels of using robots in AM operations. This mini review combines several areas to provide powerful ideas in order to deal with the industrialization of AM technology.
4 CONCLUSIONS
The purpose and the scope of this mini review can be briefly summarized in the identification of failure cases due to uncertainty when using robots in AM machines. The uncertainty concept is examined for both AM and robotic systems. In fact, the significance of addressing uncertainty in this mini review is to avoid or reduce unexpected defect / fault / failure cases. Here, the main finding can be summarized in the difficulty of determining the exact reasons of defect / fault / failure occurrence. Subsequently, the mini review presents various uncertainty issues related to AM and robotic systems, aiming to find logical solutions for each. Since the causes of the different defects / faults / failures are not exactly identified, the proposed solutions seek to solve the problem in a logical way. Some ideas and suggestions are provided to deal with some uncertainty issues with the objective of reducing the likelihood of defect / fault / failure cases. As suggestions, maintenance actions and / or code modifications (certain input values) can highly help in attending this objective. As future perspectives, it is very important to use advanced machine learning techniques to establish pretrained networks with uncertainty cases (issues and solutions) and also to make decisions to be able to industrialize AM technology. In addition, as a future perspective, the exchange between AM and robotics can be carried out in a concurrent procedure until the satisfaction of several requirements. This way, a concurrent AM / robotics loop can be elaborated for a specific AM technique such as FFF and next extended to other AM techniques which leads to elaborating reliable IS4AM. Finally, we have to mention that there is a future perspective to study uncertainty in detail with the object of preventing or reducing the likelihood of damage cases which can occur to the machine elements and / or to the environmental surroundings.
Acknowledgements
The author would like to acknowledge his colleagues at Luleå University of Technology for their fruitful discussions and different facilities, tools and technical supports related to Northvolt’s Program. Another acknowledgement is given to GOTO10 Malmö and INVIZE company in Sweden for their technical and material supports regarding additive manufacturing and robotics issues.
Conflicts of Interest
The author declares that there is no conflict of interests.
Author Contribution
Ghais Kharmanda elaborated, wrote, reviewed, and corrected this article.
Abbreviation List
AFS, Acceptable Failure Sign
AI, Artificial Intelligence
AM, Additive Manufacturing
DML, Deep Machine Learning
FDM, Fused Deposition Modelling
FFF, Fused Filament Fabrication
FMEA, Failure Modes and Effects Analysis
FMECA, Failure Mode, Effects and Criticality Analysis
HD, Horizontal Direction
IS4AM, Industrialization Standards for AM
MBD, Model-Based Design
PD, Perpendicular Direction
PM, Preventive Maintenance
RML, Reinforcement Machine Learning
SFS, Significant Failure Sign
SM, Servo Motor
UFS, Unacceptable Failure Sign
References
[1] Davim JP, Gupta K. Handbooks in Advanced Manufacturing: Additive Manufacturing. Eskisehir Osmangazi University, Eskisehir, Turkey: Elsevier, 2021.
[2] Kumar A, Mittal RK, Haleem A. Advances in Additive Manufacturing: Artificial Intelligence, Nature-Inspired, and Biomanufacturing. Elsevier: Amsterdam, Holland, 2023.
[3] Chua CK, Wong CH, Yeong WY. Standards, Quality Control, and Measurement Sciences in 3D Printing and Additive Manufacturing. Academic Press is an imprint of Elsevier, London, United Kingdom, 2017.
[4] Zhao J, Yang Y, Kobir MH et al. Driving additive manufacturing towards circular economy: State-of-the-art and future research directions. J Manuf Process, 2024; 124: 621-637.[DOI]
[5] Kharmanda G. A Review on Uncertainty Cases in Additively Manufactured Polylactic Acid Using Fused Filament Fabrication Technique. Int J Addit Manuf Struct, 2023; 2.[DOI]
[6] Kharmanda G, Baammi H, El-Hami A. Uncertainty in artificial intelligence: application to maintenance in additive manufacturing. In Uncertainties and artificial intelligence: Additive manufacturing, vibration control, agro-composite, mechatronics[In French]. ISTE Group: London, 2024.
[7] Ben-Ari M, Mondada F, Ben-Ari M et al. Kinematics of a robotic manipulator. Elem Robot, 2018; 2018: 267-291.[DOI]
[8] Klancar G, Zdesar A, Blazic S et al. Wheeled mobile robotics: From fundamentals towards autonomous systems. Elsevier, Waltham, MA, 2017.
[9] Fragapane G, De Koster R, Sgarbossa F et al. Planning and control of autonomous mobile robots for intralogistics: Literature review and research agenda. Eur J Oper Res, 2021; 294: 405-426.[DOI]
[10] Zafar MN, Mohanta JC. Methodology for path planning and optimization of mobile robots: A review. Procedia Comput Sci, 2018; 133: 141-152.[DOI]
[11] Patle BK, Pandey A, Parhi DRK et al. A review: On path planning strategies for navigation of mobile robot. Def Technol, 2019; 15: 582-606.[DOI]
[12] Yang L, Li P, Qian S et al. Path Planning Technique for Mobile Robots: A Review. Machines, 2023; 11: 980.[DOI]
[13] Gautam R, Gedam A, Zade A et al. Review on development of industrial robotic arm. Int Res J Eng Technol, 2017; 4: 429.
[14] Samadikhoshkho Z, Zareinia K, Janabi-Sharifi F. A brief review on robotic grippers classifications. In 2019 IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), Edmonton, AB, Canada, 05-08 May 2019.
[15] Hughes J, Culha U, Giardina F et al. Soft manipulators and grippers: A review. Front Robot Ai, 2016; 3: 69.[DOI]
[16] Zhang B, Xie Y, Zhou J et al. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput Electron Agr, 2020; 177: 105694.[DOI]
[17] Surati S, Hedaoo S, Rotti T et al. Pick and place robotic arm: a review paper. Int Res J Eng Technol, 2021; 8: 2121-2129.
[18] Hernandez J, Sunny M S H, Sanjuan J, et al. Current designs of robotic arm grippers: A comprehensive systematic review. Robotics, 2023; 12: 5.[DOI]
[19] AboZaid YA, Aboelrayat MT, Fahim IS et al. Soft Robotic Grippers: A Review on Technologies, Materials, and Applications. Sensor Actuat A-Phys, 2024; 2024: 115380.[DOI]
[20] Anderson EL, Hattis D. Uncertainty and variability. Risk Anal, 1999; 19: 47-49.[DOI]
[21] VermaAK, Ajit S, Karanki DR. Uncertainty Analysis in Reliability/Safety Assessment. In Reliability and Safety Engineering (Second ed.), Springer-Verlag: London, 2016.
[22] Tebbi O, Guérin F, Dumon B. Reliability testing of Mechanical Products-Application of statistical accelerated life testing models. In 9th International Conference on Applications of Statistics and Probability in Civil Engineering, Berkeley, USA, 2003.
[23] Arribas R. Mars Sample Fetch Rover: Autonomous, Robotic Sample Fetching. In MATLAB EXPO 2022 Online Conference, 17-18 May, 2022.
[24] Ono K. Developing an Autonomous Cobot with Multimodal Control Using Model-Based Design. In MATLAB EXPO 2022 Online Conference, 17-18 May, 2022.
[25] Corless M, Zhang L. Design and Simulate Scenarios for Automated Driving Applications. In MATLAB EXPO 2022 Online Conference, 17-18 May, 2022.
[26] Liu J, Gaynor AT, Chen S et al. Current and future trends in topology optimization for additive manufacturing. Struct Multidiscip O, 2018; 57: 2457-2483.[DOI]
[27] Li Z, Tsavdaridis KD, Gardner L. A review of optimised additively manufactured steel connections for modular building systems. Industrializing Addit Manuf: P AMPA2020, 2021; 2021: 357-373.[DOI]
[28] Ribeiro TP, Bernardo LFA, Andrade JMA. Topology optimisation in structural steel design for additive manufacturing. Appl Sci, 2021; 11: 2112.[DOI]
[29] Kharmanda G. Additive manufacturing of polylactic acid (PLA) material considering preheating uncertainty effect. Uncertainties Reliab Multi-Phys Syst, 2022; 1: 22-6.[DOI]
[30] Liu S, Wang F, Liu Z et al. A two-finger soft-robotic gripper with enveloping and pinching grasping modes. Ieee-Asme T Mech, 2020; 26: 146-155.[DOI]
[31] Kharmanda G. Challenges and future perspectives for additively manufactured polylactic acid using fused filament fabrication in dentistry. J Funct Biomater, 2023; 14: 334.[DOI]
[32] Wojtyła S, Klama P, Baran T. Is 3D printing safe? Analysis of the thermal treatment of thermoplastics: ABS, PLA, PET, and nylon. J Occup Environ Hyg, 2017; 14: D80-D85.[DOI]
[33] Shokry A, Kharmanda G, Mulki H et al. Six Sigma Analysis of Mini-Plate Fixation Systems Used in Human Mandible Fractures: A Clinical Case Study of Symphysis Fracture. Appl Sci, 2023; 13: 12501.[DOI]
[34] Xia X, Li T, Sang S et al. Path planning for obstacle avoidance of robot arm based on improved potential field method. Sensors, 2023; 23: 3754.[DOI]
[35] Ivanov V, Andrusyshyn V, Pavlenko I et al. New classification of industrial robotic gripping systems for sustainable production. Sci Rep-Uk, 2024; 14: 295.[DOI]
[36] Al-Kamil SJ, Szabolcsi R. Optimizing path planning in mobile robot systems using motion capture technology. Results Eng, 2024; 22: 102043.[DOI]
[37] Pawar V, Bire S, More S et al. Review on design and development of robotic arm generation-1. Int J Innov Sci Res Technol, 2018; 3: 527-529.
[38] Corke PI. Robotics and Control: Fundamental Algorithms in MATLAB. Springer International Publishing, Cham, Switzerland, 2022.
[39] Nayik GA, Muzaffar K, Gull A. Robotics and food technology: A mini review. J Nutr Food Sci, 2015; 5: 1-11.
[40] Hossain R. A Short Review of Artificial Intelligence. J Artif Intell, Mach Learn Soft Comput, 2022; 7: 48-55.
Copyright © 2024 The Author(s). This open-access article is licensed under a Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, sharing, adaptation, distribution, and reproduction in any medium, provided the original work is properly cited.


