Overview of Substation Modeling Based on 3D Point Cloud
Haiquan Zhang1, Yong Luo1*, Qianjin Yuan1, Dongshu Wang1
1School of Electrical Engineering, Zhengzhou University, Zhengzhou, China
*Correspondence to: Yong Luo, PhD, Professor, School of Electrical Engineering, Zhengzhou University, No.100 Science Ave., High-tech. Development District, Zhengzhou 450001, China; Email: luoyong@zzu.edu.cn
Abstract
Point cloud is the definition of point set in three-dimensional (3D) space. It has become one of the most important data formats of 3D representation. 3D laser scanner can acquire the spatial point information of 3D objects accurately and quickly. 3D point cloud can restore the surface information of 3D objects and maintain the detailed characteristics of 3D entities, therefore, it is widely implicated in unmanned driving, protection of ancient buildings, digital city, terrain detection, urban and rural planning, reverse engineering, and scene reconstruction. Recently, 3D point cloud technology was applied to transformer substation automatic modeling, using a variety of techniques at various stages. Therefore, the current study summarizes different point cloud processing techniques in the substation modeling process, mainly constituting 4 parts: substation point cloud pretreatment, substation equipment segmentation, affiliated facilities segmentation, and substation equipment identification. In this article, we'll define root cause analysis, outline common techniques, walk through a template methodology to address the problems of substation point cloud modeling.
Keywords: point cloud, modeling review, substation, whole segmentation, identify
1 INTRODUCTION
Substation, a core component of power system, plays a vital role in realizing power conversion and transmission. The maintainance and detection efficiency of substation is closely associated with the safe and stable operation of the power system[1]. The stable operation of substations is essential for people's normal production and life. In order to improve the stable operational level and adapt to the increasingly complex maintenance work of substations, smart substations[2,3] have begun to emerge and gradually become the focus of research. On the one hand, it is equipped with computer-aided monitoring of the operation status of each piece of equipment in the substation. On the other hand, the smart substation constitutes a three-dimensional (3D) scene, and the visualization effect is more intuitive. Managers can understand the overall structure and details of a substation more conveniently and quickly through the 3D model, which provides great convenience for the daily operation and maintenance of the substation. In building a smart substation, the most critical step is establishing a high-quality 3D model of the substation to restore the real scene of the substation.
In summary, 3D modeling and digital management of substations have become the developmental direction of smart substations in the future, which can improve the operation and maintenance efficiency of substations and speed up the reconstruction of substations.
Many experts and scholars have researched the 3D modeling of substations and bagged some achievements. Quintana and Mendoza put forward four requirements to establish the 3D models of electrical equipment[4]. Different countries proposed different standards for substation modeling[5]. Wang et al.[6] used two-dimensional (2D) images to realize the modeling of substations. Specifically, they used Yolov5 visual detection algorithm to identify the key components of a substation. However, this method can only identify equipment but cannot realize the reconstruction of electrical equipment. Maas and Vosselman used a parameter primitive library matching method for 3D modeling composed of point clouds[7]. However, the developed approach is not sensitive to the quality of point cloud data, and the accuracy is greatly affected by the model category in the parameter model library. Sun et al.[8] exploited mapping and 2D images to establish a 3D model of a substation. This method builds a 3D model by calculating the mapping data, avoiding the shortcomings of the large amount of data collected by a 3D laser scanner. Wang et al.[9] combined the 3D model of the substation with operation management to form a 3D virtual digital visualization system, which unravels the problem of 2D inability to display relevant information. The traditional 3D modeling method cannot ensure consistency between the size and position of equipment with the actual scene when modeling substation equipment. Besides this, other limitations in the traditional 3D modeling method include long modeling time, complex operation, low modeling efficiency, and high environmental requirements[10]. With the rapid development of laser scanning technology, 3D image processing has gradually become a research hotspot.
The 3D point cloud is one of the main representations of 3D images. 3D laser scanners can accurately and quickly obtain spatial point information of a 3D object surface[11]. The collection of these spatial points data is called a 3D point cloud. The 3D point cloud can restore the surface information of 3D objects and maintain the detailed characteristics of the 3D entity itself; therefore, it is widely exploited in unmanned driving, ancient building protection, digital city, terrain detection, urban and rural planning, reverse engineering and scene reconstruction and other fields[12-14].
Hao et al.[15] used a 3D laser scanner to obtain the cloud data of a substation. Firstly divided areas based on the complexity of space area. Then used iterative closest point (ICP) algorithm to register the point cloud of the substation. Finally employed Trimble Realworks and 3DMAX software to realize the modeling and visualization of the substation scene; however, were unable to realize the automatic modeling of substations. Gonzalez et al.[16] proposed the use of a photographic scanning system and lidar system for 3D modeling of substations. This method integrates the data obtained by the photographic scanning system with that of lidar and uses point cloud data to generate the CAD models. However, this method is limited by the image field of view and can only semi-automatically develop CAD models with user interaction. Wu et al.[17] extracted various substation equipment by detecting the internal topology structure of the laser point cloud data of substation, matching the equipment with standard templates in the database to complete the identification, and finally realizing the reconstruction of the substation, but this method cannot realize electrical equipment automatic recognition. Wu et al.[18] proposed a method for extracting substation equipment based on laser point cloud. First uses a multi-scale morphological filtering algorithm to cluster and segment the ground point cloud, followed by substation equipment extraction based on the dimensional features of the point cloud. Liu et al.[19] used the spatial data of substations collected by ground 3D laser scanners to achieve 3D spatial modeling. The complex geometric data is quickly obtained from buildings, objects, etc. using a ground 3D laser scanner, and a triangular mesh is established to generate a 3D surface model. Li et al.[20] studied automatic surface reconstruction based on point cloud data and realized the rapid automatic reconstruction of the 3D model of the substation.
3D point cloud object preprocessing steps mainly include point cloud reduction and point cloud denoising. The amount of point cloud data obtained by 3D laser scanners is huge and contains many redundant points[21]. The unsimplified point cloud data greatly impacts the subsequent processing efficiency and feature extraction. Therefore, the substation equipment should be simplified without losing a lot of detailed features. At present, the reduction methods of point cloud data can be classified into two types: One is a simplified algorithm based on 3D space division, such as the bounding box method, uniform sampling method, triangular mesh method, etc. The other is a simplified method that acts directly on points, such as random sampling, curvature sampling, etc. The substation reconstruction process based on point cloud is shown in Figure 1.
|
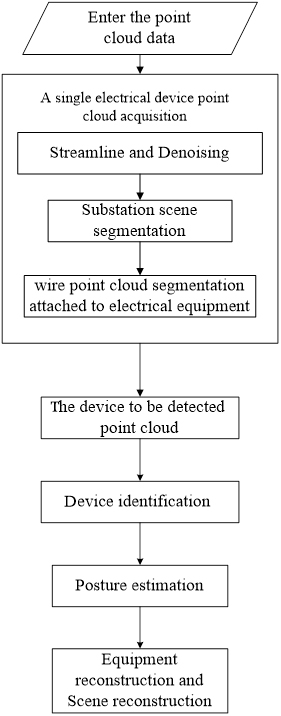
Figure 1. Substation reconstruction process.
2 SUBSTATION POINT CLOUD PREPROCESSING
2.1 Reduction Algorithm Based on 3D Space Division
The core idea of the simplification algorithm based on 3D space division is to construct a polygonal mesh, judge the mesh for redundancy according to the prescribed principles, and finally delete the points in the redundant mesh to reduce the point cloud. The disadvantage is that the mesh construction will consume a lot of time. Filip et al.[22] proposed the bounding box method to simplify the point cloud data. This method can quickly realize the simplification of the point cloud, however, the algorithm loses feature points readily in a dense point cloud and is not suitable for the point cloud data with uneven distribution. The method firstly establishes the minimum oriented bounding box (OBB) of the point cloud, then divides the OBB into several small cubes of equal sizes according to the segmentation accuracy, and finally uses the center of a small cube to represent all the points inside it to simplify the point cloud data. Lee et al.[23] proposed a non-uniform grid method, which classifies a big grid into multiple small grids until the normal vector deviation of the data points in each small grid reaches below the threshold. The algorithm exhibits elevated time complexity, but the simplified objects have better information about geometric characteristics. Chen et al.[24] introduce triangulation meshing, which can reduce the point cloud by reducing the number of meshes. Zhou et al.[25] used octree structure to complete the spatial division of point cloud data. The normal angle of the point cloud in grid is used as the simplification basis, and the points closest to the average normal vector in each bounding box are retained to complete the simplification of the point cloud. Li et al.[26] proposed a point cloud simplification method that can retain the characteristics of objects. The method firstly voxelized point cloud data. Then extracts the plane voxels according to the point cloud normal vector, subsequently, the non-planar voxels are assessed. Finally, the feature points of the point cloud are preserved.
2.2 Reduction Algorithm Based on Point
The point-based simplification algorithm directly simplifies point cloud without constructing its topological structure. Sun et al.[27] proposed a random sampling method to simplify point cloud data. The random sampling method firstly creates a random function containing all point cloud data. It then deletes the point cloud data corresponding to the random number generated by a random function. The deleting operation continues until it reaches the required reduction rate Because the algorithm generates number randomly, the point cloud data differs from one another after every simplification. In addition, when the original point cloud is simplified by a random sampling method, defects might appear that badly impact the quality of simplification in the simplified point cloud. Similarly, Lee and Woo put forward a uniform sampling method[28]. This method simplifies the point cloud by taking the closest distance from starting points generated randomly to any point of point cloud set as the criterion. This approach has the benefit of evenly distributing simplified points due to the uniform sampling procedure and the simplified points distributed near the border. The disadvantage is that the distance between sets needs to be calculated repeatedly every time for sampling points, which causes high time consumption. Usually, the curvature can reflect the changes of point-cloud's surface. Han et al.[29] simplified the point cloud by employing the curvature feature, based on the fact that the areas of high curvature contain more shape features. In their algorithm, the curvature of all points is extracted, and the mean value of curvature is calculated first. Then, the point cloud is simplified according to the set simplification principle to realize the downsampling of point cloud. The curvature-based point cloud simplification algorithm can better retain the shape feature of 3D object. However, due to the small curvature value of the flat region of point cloud, all the points in the region may be deleted when the curvature-based method is applied to this region, resulting in a missing point cloud.
2.3 Methods for Point Cloud Denoising
When a 3D laser scanner scans a substation scene, the obtained point cloud data inevitably contains noise points mostly due to the scanner fault, the environment's interference and the substation equipment's material. The existence of noise points will affect the subsequent process of point cloud, so the noise points need to be removed. Currently, two point cloud denoising approaches are available: statistics-based and neighborhood-based filtering technology.
2.3.1 Statistics-based Filtering Technology
Since statistical concepts apply to the properties of point cloud, many scholars introduce statistical methods to study point cloud filtering technique. Gaussian filtering is a widely used method that calculates the Euclidean distance between a point of interest and its neighborhood. Gaussian weight will be determined according to the distance to filter outliers[30]. In median filtering method, point cloud data is usually scanned in a window, and the data in the window is sorted according to the value of one coordinate. The intermediate value of the sorted data is taken as the corresponding coordinate value of the window output[31]. Avron et al.[32] introduced L1-sparse-paradigm into point cloud filtering algorithm. The algorithm minimizes residual function by weighted L1, and retains points according to the local flatness criterion to keep the features of sharp areas. Although this approach provides reasonable results, the points on edge could not be accurately recovered. Zhang et al.[33] used the k-d tree algorithm to organize point cloud data, and calculated the normal distribution function of the distance between noise points and their neighboring points. This method can filter out the isolated noise points in point cloud.
2.3.2 Neighborhood-based Filtering Technology
Neighborhood-based filtering technology uses the similarity between points and neighborhood points to denoise. Tomasi et al.[34] extended bilateral filtering from 2D image filtering to 3D point cloud filtering. Bilateral filter can be regarded as a smooth filter that can retain marginal points and the details of point cloud, but the algorithm's performance is not ideal for outlier denoising. Cao et al.[35] divided point cloud data into feature and non-feature points by analyzing the point's neighborhood. This method avoids the excessive smoothness of the bilateral filtering algorithm, but it is unsuitable for 3D objects with complex shapes, such as electrical equipment. Song et al.[36] proposed a denoising algorithm combining improved C-means clustering algorithm and traditional bilateral filtering algorithm, which classifies noise into large scale noise and small scale noise to process, respectively, but the algorithm ran slowly.
3 SUBSTATION POINT CLOUD SEGMENTATION
3.1 Segmentation of Large Scenes
In realizing substation automatic modeling, automatic identification of all kinds of equipment directly from the point cloud is challenging because of the complexity of substation scenes. Therefore, processing individual electrical devices in the following steps necessitates clustering and segmenting the point clouds after denoising[37]. At present, point cloud segmentation methods mainly include random sampling consistency segmentation, Euclidean clustering segmentation, density clustering segmentation, and regional growth segmentation[38]. Due to the huge amount of point cloud data of substation, the irregular shapes of substation equipment, and adhesion of appendages such as wires and pedestals with the leading equipment, the feature differentiation of substation equipment is not obvious, which is challenging for segmentation.
Fang et al.[39] put forward a substation segmentation method based on random forest. For substation point cloud obtained, this method first transfers point cloud to voxel space, then the voxels of similar density are merged, and the random forest algorithm is used to classify edge points to merge the equipment's edge so that segmentation of single electrical equipment is completed. Arastounia and Lichti extracted and identified transformers in the substation[40]. To realize the extraction of transformers, they proposed six strategies to remove fence, cable, circuit breaker, casing and bus tube, then realized the classification and identification of transformers depending on random sample consensus (RANSAC) algorithm. This method only applies to these relatively simple substation scenes and performs poorly in complex scenes. Guo et al.[41] put forward a kind of efficient and voxel-based substation scene segmentation method. In the segmentation process, the algorithm firstly removes the ground point cloud according to elevation differences, slices it and clusters it in horizontal direction, then perform reclustering by using vertical clustering to complete the segmentation. However, this method is operated without removing wires in the clustering process, so the segmentation accuracy is not high. Vanegas et al.[42] proposed an effective automatic point segmentation and extraction method for the large-scale point cloud of Manhattan-style buildings, but its application is only limited to building objects with sharp edges. Wang et al.[43] used an implicit shape model to describe objects, and used Hough forest architecture to block and detect point cloud images of city. Cyclic and distance weight voting mechanisms were also proposed in their method. Similarly, Douillard applied geometric features to segmentation. The method has extremely strict requirements on point cloud model. It can easily cause over-segmentation on application to rough physical point clud[44].
3.2 Segmentation of Affiliated Facilities
Substation equipment usually stands on foundation beds and is connected with affiliated facilities, such as wires or straight poles. The above-affiliated facilities interfere with identifying substation equipment, so should be segmented and removed. The main task of affiliated facilities segmentation is to cluster an original point cloud set according to specific criteria to separate affiliated facilities from electrical equipment[45]. At present, 3D point cloud segmentation methods can be divided into five categories: edge-based method, region-based method, model-fitting-based method, clustering-based method, and deep-learning-based method.
Rabbani et al.[46] segmented 3D point cloud data of industrial sites using smoothing constraint algorithm. However, the method focus was limited to segmenting smoothly connected areas, rather than identifying individual objects in the sites. Jaehong et al.[47] realized the removal of substation equipment's wires through many binarization aerial photos. This approach is based on the differences between cables and the surrounding environment in binarization picture to segment wires. However, this method is unsuitable for 3D point cloud data and cannot segment wires and foundation beds in the 3D substation point cloud. Polewski et al.[48] exploited constrained random scenarios to improve 3D point cloud data for the segmentation of falling tree stems. The positions of falling tree stems are fixed on ground, while the positions of affiliated facilities of substation equipment are not fixed, making algorithm not applicable for the division of wires or foundation beds. Sun firstly used K-means algorithm to segment the 2D images of substation equipment and used the fast Fourier transform algorithm to extract the features of the equipment in 2D images. Based on the mapping between 2D images and 3D objects, the equipment in 2D images was retrieved and segmented[49]. However, this algorithm aimed at 2D images of substation equipment and cannot segment 3D point cloud data. Chen et al.[50] poised an improved RANSAC algorithm to segment roofs. The algorithm retains topology consistency among primitives and avoids under-segmentation and over-segmentation effectively. Jin et al.[51] proposed a 3D point cloud segmentation method based on a probability model. However, wires cannot be utterly segmented because they are connected to substation equipment. For equipment segmenting from the entire substation, Fang et al.[52] poised a forest-based to realized the segmentation of substation equipment by clustering method. However, this method cannot effectively segment wires and foundation bed, and it has high requirements for the integrity of point cloud. Therefore, the segmentation effect of defective point cloud is not good. Wang et al.[53] proposed a method to improve the relationship of neighboring points in local surface convexity algorithm, which mainly solved the problems of under-segmentation and over-segmentation when dealing with scattered point clouds in complex environment. Effective segmentation region is formed by judging the connected set's characteristics, consisting of primary vertex and surrounding points. This method has good segmentation performance for convex body, but for non-convex body, it not exhibit good impact. The above mentioned method does not constitute a good effect on removing wires and foundation beds from substation equipment. Li et al.[54] proposed an improved region growth segmentation method. By estimating the curvature of point cloud data, the point of minimum curvature is set as the seed node, indicating that the point cloud data starts growing from the flattest region. The total number of segments can be reduced, and the growth criterion is determined according to the local characteristics of point cloud data to realize the segmentation of point cloud data. However, the threshold in this method must be determined manually not automatically. Therefore, it is difficult to segment wires and foundation beds effectively in a complex substation scène. Wang proposed a 3D colorful point cloud segmentation method based on the principal component feature sphere, which segmented 3D colorful point cloud with the hierarchical idea[55]. Since there is no noticeable difference among substation equipment in color, and the obtained point cloud data does not have color characteristics, it is not suitable for substation equipment segmentation.
The edge-based segmentation method applies 2D image segmentation to 3D point cloud directly. The technique detects edge points according to the surface properties of point cloud, and then groups edge points to achieve original point cloud segmentation. Jiang et al. proposed a point cloud segmentation method based on scan lines, which extracted the scan lines in distance image as basic segmentation primitive, and realized the segmentation of 3D model by clustering the scan lines. This method has low computational complexity but only applies to distance images[56]. Sappa and Devy proposed a technique to extract point cloud boundaries from binary edge graphs[57], which can quickly segment point cloud data with uneven density. If the point cloud scene is relatively simple, the edge-based method can rapidly segment point cloud data, but its sensitivity to noise and density renders it unfavorable for dense or large-scale point cloud data sets.
The region-growth-based method obtains multiple segmented regions that greatly differ by merging points or regions with similar characteristics. Compared with the edge-based segmentation method, the region growth method performs better in scenes with more noise. Besl and Jain first proposed the region growth segmentation algorithm in 1988[58]. The algorithm is mainly divided into two steps. Firstly, extract the curvature information of each point in image, determine seed points and set the curvature threshold. Then the seed points grow according to the region growth criterion to realize image segmentation. However, this method is sensitive to noise and time-consuming in point cloud segmentation. Focusing on the time-consuming algorithm, Yang et al.[59] proposed to voxel point cloud approach which use voxel to represent points to improve growth efficiency, but this method could not segment the edge of point cloud. Vo et al.[60] poised an octree to organize point clouds and proposed an improved voxel-based region growth algorithm. The method successfully segmented buildings from point cloud scenes, but it was limited to objects with sharp edges.
The model-fitting-based point cloud segmentation method's core idea is to fit point clouds with different geometric shapes, such as cylinders, cube, sphere, and plane. The most common model fitting algorithms are divided into the Hough transform (HT) algorithm and RANSAC algorithm. HT algorithm proposed by Richard and Peter in 1972 is a classic feature detection algorithm in image processing. It maps the samples in original space to discrete parameter space and votes each input sample through accumulator. Zhang and Lu used 3D HT algorithm to fit cylinder and successfully separated the pipes' point cloud in the process plant[61]. Han proposed an enhancement to the classical HT by including a scan line, which greatly accelerated the convergence speed of the algorithm and successfully separated the spherical object on the roof of the building[62]. RANSAC is another model fitting method, and the algorithm mainly includes two steps: generating hypothesis from random samples and verifying the hypothesis. Lan proposed a GPU-based RANSAC algorithm, which can segment plane models quickly and accurately[63].
The core idea of the clustering-based point cloud segmentation method is to cluster regions with high similarity of attributes in point cloud scene into certain classes. Common clustering methods include K-means, spectral clustering and fuzzy clustering. Sampath and Shan extracted the normal vector of the building roof point cloud as a clustering condition, and realized the multi-faceted building roof point cloud segmentation by K-means[64]. Wang et al.[65] proposed a feature line extraction method of point cloud, and introduced the optimized fuzzy C-means clustering algorithm to cluster point cloud scenes. This method can obtain good results for the point cloud with sharp edges. Liu et al.[66] proposed a high-voltage tower extraction method based on grid characteristics. If there is no superposition between wires and equipment in space, this algorithm can quickly extract the tower.
The deep-learning-based point cloud segmentation method is widely exploited in domains such as driverless cars and smart cities. The classic method is using 3D filter to train a convolutional neural network. This method can obtain good segmentation effect, but large hash rate requirement caused by training dataset and 3D convolution kernels greatly influences segmentation efficiency[67]. Qi et al.[68] proposed PointNet, the first neural network algorithm that directly processed point cloud data. This method first projects point cloud to a specific perspective, then processes it to realize the segmentation task of point cloud scenes. However, this method obtains the point cloud's global features and ignores its local features.
4 SUBSTATION EQUIPMENT IDENTIFICATION
Point cloud identification is to sift out the template similar to the sample from template library as the identification result according to the extracted feature vector. The identification generally includes two steps: feature expression and feature matching. At present, 3D identification algorithms can be mainly divided into two types: shape-based identification and feature-based identification.
The main idea of the shape-based identification method is to extract the overall shape information of the point cloud, such as volume, projected area, and elevation information, then carry out target identification. Besl and Mckay[69] coined a new method to identify 3D objects by accurate registration, which is referred to as ICP registration method. ICP registration method is to find the sample with the highest matching degree as classification result through continuous iterative matching. This method can accurately register and identify target, but its efficiency is low for mass data due to vast iterative computation. Dou et al.[70] proposed to use the rolling method to extract the contour features of point cloud projection after dimensionality reduction, then use the features for pre-recognition before using ICP algorithm for identification.
The feature-based identification method calculates the similarity between test set and template set based on the extracted point cloud features, then determines the object type in the test set. Mian et al.[71] proposed a new algorithm based on 3D models and realized the automatic acquisition of the classified model library. The offline model library is automatically constructed by the 3D model of object from its multiple unordered range images, then similarity calculation is performed to realize online recognition. Smeets et al.[72] applied mesh Scale-invariant feature transform algorithm to 3D face recognition. The convex points of 3D face surface are detected as extreme points of mean curvature in scale space. These feature vectors consisting of shape index and inclined angle near each outburst point are used to match to improve the recognition system's robustness. Weir used unique invariant features extracted from images to perform matching between reliable objects or views of different scenes[73]. Xiao et al.[74] realized 3D surface recognition by using the surface characteristics and the rigid shape of region to align the object's surface. Guo et al.[75] proposed a layered 3D object recognition algorithm by rotating the neighborhood points of projecting feature points onto a 2D plane. Guo et al.[76] proposed a method to recognize electrical equipment using subspace features. The method took the cosine value of the included angle between the barycenter of voxel square and that of point cloud as the feature and uses K-Nearest Neighbor to realize the recognition of 3D objects. When the substation equipment point cloud is relatively complete, the recognition rate of this method is high, but the result is not so satisfactory for an incomplete point cloud.
Besides, point cloud descriptors can also be used to identify 3D objects. Point cloud descriptors can be divided into global descriptors and local descriptors. The global descriptor of point cloud is the global description of a 3D target, and the typical global descriptor of point cloud includes: View feature histogram[77], clustered viewpoint feature histogram[78], global fast point feature histogram[79], and global radius-based[80]. The steps of 3D object recognition method based on global descriptor are as follows. The global descriptors of point cloud are extracted, then used to match each template's feature descriptor. Finally, the template with the highest similarity is found as the recognition result. This method can achieve good result when there is no missing or occlusion in point cloud. On the contrary, local descriptors only describe the features in the neighborhood of certain point, and the common local descriptors of point cloud include Point feature histogram[81], fast point feature histogram[82], the signature of histogram of orientation[83], and rotational projection statistics[84]. The point cloud recognition method based on local descriptors firstly extracts the key points of point cloud, then calculates the local descriptors in the neighborhood of each key point, respectively. Finally, local descriptors of all key points are used to represent point cloud objects and match with templates to realize 3D target recognition. The point cloud recognition method based on local descriptors can achieve good results for the incomplete point cloud. However, this method performs poorly when the scene contains much noise which influences the calculation of point features in local area.
5 CONCLUSION
Above all, substation point cloud modeling has gradually become a hot spot for research community. In substation 3D modeling, the key steps involve segmenting substation equipment from the big scene, removing substation equipment affiliated facilities, and recognition. The mature solutions in these fields have not yet appeared, and the research still faces many challenges.
(1) The current simplification and denoising algorithm of the substation point cloud is usually based on voxel. Retaining some points in each voxel may lose the detailed features of point cloud. In addition, due to the gigantic quantity of data in point cloud scenarios, the processing will face many problems, such as high computational complexity and low efficiency. Therefore, how to extract feature points and remove redundant points from massive point cloud data is a direction worthy of study.
(2) Although many algorithms techniques have emerged, using deep learning algorithms. The current segmentation methods application is limited a certain field rather than substation modeling because of the huge amount of point cloud data, the irregular shape of substation equipment, the adhesion of affiliated facilities, and the inconspicuous distinguishing of equipment characteristics. Therefore, it is difficult to find a general algorithm to extract the features of affiliated facilities and effectively segment them.
(3) Currently, many 3D object recognition methods are in place, but different recognition technology may cross with related image information to a certain extent, so recognition methods target strong. At the same time, no universal recognition method can solve the problem of substation equipment identification in complex environments. The recognition algorithm designed according to actual environment is not universal, but the ideas and technology used are enlightening and instructive.
Acknowledgements
This work was supported by National Natural Science Foundation of China (62173309).
Conflicts of Interest
The authors declared that they have no competing interests.
Author Contribution
All authors contributed to the manuscript and approved the final version.
Abbreviation List
2D, Two-dimensional
3D, Three-dimensional
HT, Hough transform
ICP, Iterative closest point
OBB, Oriented bounding box
RANSAC, Random sample consensus
References
[4] Quintana J, Mendoza E. 3D virtual models applied in power substation projects. 2009 15th International Conference on Intelligent System Applications to Power Systems, Curitiba, Brazil, 8-12 November 2009. DOI: 10.1109/ISAP.2009.5352921
[5] Ali I, Hussain SS, Tak A et al. Communication modeling for differential protection in IEC-61850-based substations. IEEE T Ind Appl, 2018; 54: 135-142. DOI: 10.1109/TIA.2017.2740301
[6] Wang F, Wang Q, Ren JY et al. Substation electrical equipment detection and 3D modeling system [In Chinese]. Electr Meas Instrum, 2021; 58: 160-167. DOI: 10.19753/j.issn1001-1390.2021.03.025
[7] Maas HG, Vosselman G. Two algorithms for extracting building models from raw laser altimetry data. J Photogramm, 1999; 54: 153-163. DOI: 10.1016/S0924-2716(99)00004-0
[8] Sun L, Suo XS, Liu YF et al. 3D modeling of transformer substation based on mapping and 2D images. Math Probl Eng, 2016; 2: 1-6. DOI: 10.1155/2016/9320502
[10] Shen ZQ. Research on 3d point cloud feature description and recognition reconstruction technology [Master's thesis]. Jinan: Shandong University; 2018.
[11] Zhong MQ. Measurement of urban building facade based on 3D laser scanning technology. B Surv Mapp, 2020; 34: 1606-1609.
[14] Bi SP, Bi J, Zhang Y. Application of airborne LiDAR in coastal survey. Mar Geol Front, 2012; 28: 59-64.
[15] Hao P, Xu JH, Ni SQ. Application of ground 3D laser scanning technique in substation fine measurement. Bull Surv Mapp, 2017; 12: 107-111. DOI: 10.13474/j.cnki.11-2246.2017.0390
[17] Wu QY, Yang HB, Wei MQ et al. Automatic 3D reconstruction of electrical substation scene from LiDAR point cloud. ISPRS J Photogramm, 2018, 143: 57 -71. DOI: 10.1016/j.isprsjprs.2018.04.024
[19] Liu QL, Hu WS, Wang C et al. Application of 3D laser scanner to substation modeling in Hui-Quan region [In Chinese]. J Surv Mapp, 2011; 1: 210-212.
[20] Li J, Wang B, Wang XC et al. Three-dimensional full truth modeling method for substation based on massive point cloud data [In Chinese]. N China Elec Pow Techno, 2016; 7: 26-30. DOI: 10.16308/j.cnki.issn1003-9171.2016.07.005
[21] Duan Y, Yang C, Chen H et al. Low-complexity point cloud denoising for LiDAR by PCA-based dimension reduction. Opt Commun, 2021; 482: 126567. DOI: 10.1016/j.optcom.2020.126567
[22] Filip D, Magedson R, Markot R et al. Surface algorithms using bounds on derivatives-Science Direct. Comput Aided Geom D, 1986; 3: 295-311. DOI: 10.1016/0167-8396(86)90005-1
[23] Lee KH, Woo H, Suk T. Data reduction methods for reverse engineering. Int J Adv Manufact Technology, 2001; 17: 735-743. DOI: 10.1007/s001700170119
[24] Chen YH, Ng CT, Wang YZ. Data reduction in integrated reverse engineering and rapid prototyping. Int J Comput Integ M, 1999; 12: 97-103. DOI: 10.1080/095119299130344
[26] Li ML, Nan LL. Feature-preserving 3D mesh simplification for urban buildings. ISPRS J Photogramm, 2021; 173: 135-150. DOI: 10.1016/j.isprsjprs.2021.01.006
[29] Han HY, Han X, Sun FS et al. Point cloud simplification with preserved edge based on normal vector. Optik-Int J Light Electron Opt, 2015; 126: 2157-2162. DOI: 10.1016/j.ijleo.2015.05.092
[30] Adams A, Gelfand N, Dolson J et al. Gaussian KD-trees for fast high-dimensional filtering. ACM T Graphic, 2009; 21: 1-12. DOI: 10.1145/1576246.1531327
[32] Avron H, Sharf A, Greif C et al. L1-Sparse reconstruction of sharp point set surfaces. ACM T Graphic, 2010; 29: 1-12. DOI: 10.1145/1857907.1857911
[33] Zhang FF, Liang YB, Wang J. Research on isolated noise filtering of laser point cloud data based on nearest neighbor search. Eng Surv Mapp, 2018; 27: 29-33.
[34] Tomasi C, Manduchi R. Bilateral filtering for gray and color images. Sixth Int Conf Comput Vis, 1998; 839-846. DOI: 10.1109/ICCV.1998.710815
[35] Cao S, Yue JP, Ma W. Denoising algorithm of bilateral filtering point cloud based on feature selection [In Chinese]. J Southeast Univ, 2013; 43: 351-354. DOI: 10.3969/j.issn.1001-0505.2013.S2.029
[37] Simões F, Almeida M, Pinheiro M et al. Challenges in 3D reconstruction from images for difficult large-scale objects: a study on the modeling of electrical substations. Proceedings of the 2012 14th Symposium on Virtual and Augmented Reality, Washington, USA, 28-31 May 2012.
[38] An L. Research on segmentation and classification algorithm of OUTDOOR SCENE 3D Point Cloud Data [Master's thesis, In Chinese]. Xi’an: Xidian University, 2018.
[40] Arastounia M, Lichti DD. Automatic object extraction from electrical substation point clouds. Rem Sen, 2015; 7: 15605-15629. DOI: 10.3390/rs71115605
[41] Guo J, Feng W, Xue J et al. An efficient voxel-based segmentation algorithm based on hierarchical clustering to extract LIDAR power equipment data in transformer substations. Ieee Access, 2020; 8: 227482-227496. DOI: 10.1109/ACCESS.2020.3046313
[42] Vanegas CA, Aliaga DG, Benes B. Automatic extraction of manhattan-world building masses from 3D laser range scans. IEEE T Vis Comput Gr, 2012; 18: 1627-1637. DOI: 10.1109/TVCG.2012.30
[43] Wang H, Wang C, Luo H et al. Object Detection in terrestrial laser scanning point clouds based on hough forest. IEEE Geosci Remote S, 2014; 11: 1807-1811. DOI: 10.1109/LGRS.2014.2309965
[44] Douillard B, Underwood J, Kuntz N et al. On the segmentation of 3D LIDAR point clouds. 2011 IEEE International Conference on Robotics and Automation, 2011, Shanghai, China, 09-13 May 2011. New York, NY: IEEE; 2011. DOI: 10.1109/ICRA.2011.5979818
[45] Baek H, Chung Y, Ju M et al. Segmentation of group-housed pigs using concave Points and edge information. 2017 19th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea (South), 19-22 February 2017. DOI: 10.23919/ICACT.2017.7890153
[47] Jaehong O, Changno L. 3D Power line extraction from multiple aerial images. Sensors, 2017; 17: 2244-2258. DOI: 10.3390/s17102244
[48] Polewski P, Yao W, Heurich M et al. Learning a constrained conditional random field for enhanced segmentation of fallen trees in ALS point clouds. ISPRS J Photogramm, 2018; 140: 33-44. DOI: 10.1016/j.isprsjprs.2017.04.001
[49] Sun L, Suo X, Liu Y et al. 3D Modeling of transformer substation based on mapping and 2D images. Math Probl Eng, 2016; 2016: 1-6, DOI: 10.1155/2016/9320502
[50] Chen D, Zhang L, Mathiopoulos PT et al. A methodology for automated segmentation and reconstruction of urban 3-D buildings from ALS point clouds. IEEE J-Stars, 2014; 7: 4199-4217. DOI: 10.1109/JSTARS.2014.2349003
[51] Jin S, Su Y, Gao S et al. Deep Learning: Individual maize segmentation from terrestrial lidar data using faster R-CNN and regional growth algorithms. Front Plant Sci, 2018; 9: 866. DOI: 10.3389/fpls.2018.00866
[54] Li RZ, Liu YY, Yang M et al. Based on an improved region-growth 3D point cloud segmentation [In Chinese]. Prog Laser Optoelectron, 2018; 55: 051502.
[56] Jiang XY, Meier U, Bunke H. Fast range image segmentation using high-level segmentation primitives. Proceedings Third IEEE Workshop on Applications of Computer Vision, Sarasota, USA, 2-4 December 1996. New York, NY: IEEE; 1996. DOI: 10.1109/ACV.1996.572006
[57] Sappa AD, Devy M. Fast range image segmentation by an edge detection strategy. Proceedings Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, Canada, 28 May 2001-1 June 2001. New York, NY: IEEE; 2001. DOI: 10.1109/IM.2001.924460
[58] Besl PJ, Jain RC. Segmentation through variable-order surface fitting. IEEE T Pattern Anal, 1988,10: 167-192. DOI: 10.1109/34.3881
[59] Yang L, Zhai RF, Yang X et al. The segmentation algorithm of plant organ point cloud combining supervoxels with regional growth [In Chinese]. Comput Engineering Appl, 2019; 55: 197-203. DOI: 10.3778/j.issn.1002-8331.1805-0221
[60] Vo AV, Linh TH, Laefer DF et al. Octree-based region growing for point cloud segmentation. ISPRS J Photogramm, 2015; 104: 88-100. DOI: 10.1016/j.isprsjprs.2015.01.011
[61] Zhang JR, Lu ZH. Detection and recognition of pipe point cloud based on feedback hough transform. Comput Modernization, 2019; 8: 6-11. DOI: 10.3969/j.issn.1006-2475.2019.08.002
[64] Sampath A, Shan J. Segmentation and reconstruction of polyhedral building roofs from aerial lidar point clouds. IEEE T Geosci Remote, 2010; 48: 1554-1567. DOI: 10.1109/TGRS.2009.2030180
[69] Besl PJ, Mckay HD. A method for registration of 3-D shapes. IEEE T Pattern Anal, 1992; 14: 239-256. DOI: 10.1117/12.57955
[71] Mian AS, Bennamoun M, Owens R. Tried-dimensional object recognition and segmentation in cluttered scenes. IEEE T Pattern Anal, 2006; 28: 1584-1601.
[72] Smeets D, Keustermans J, Vandermeulen D et al. MeshSIFT: Local surface features for 3D face recognition under expression and partial data. Comput Vis Image Und, 2013; 117: 158-169. DOI: 10.1016/j.cviu.2012.10.002
[73] Weir J. A method for invariant image modeling. Int J Comput Vision, 2004; 60: 91-110.
[74] Xiao G, Ong SH, Foong KWC et al. Efficient partial surface registration for 3D objects. Comput Vis Image Und, 2005; 98: 271-294. DOI: 10.1016/j.cviu.2004.10.001
[75] Guo Y, Sohel F, Bennamoun M. Piecemeal projection statistics of landform and landform. Int J Comput Vision, 2013; 105: 63-86.
[76] Guo WY, Ji Y, Luo Y et al. Substation equipment 3D identification based on KNN classification of subspace feature vector. J Intell Syst, 2017; 28: 807-819. DOI: 10.1515/jisys-2017-0272
[77] Rusu RB, Bradski GR, Thibaux R et al. Fast 3D recognition and pose using the viewpoint feature histogram. 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18-22 October 2010. New York, NY: IEEE; 2010. DOI: 10.1109/IROS.2010.5651280
[78] Aldoma A Vincze M, Blodow N et al. CAD-model recognition and 6DOF pose estimation using 3D cues. 10.1109/IROS.2010.56512802011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 06-13 November 2011. New York, NY: IEEE; 2011. DOI: 10.1109/ICCVW.2011.6130296
[79] Rusu RB, Holzbach A, Beetz M et al. Detecting and segmenting objects for mobile manipulation. 2009 IEEE 12th International Conference on Computer Vision Workshops, ICCV Workshops, Kyoto, Japan, 27 September 2009-04 October 2009. New York, NY: IEEE; 2009. DOI: 10.1109/ICCVW.2009.5457718
[80] Marton ZC, Pangercic D, Blodow N et al. Combined 2D-3D categorization and classification for multimodal perception systems. In J Robot Res, 2011; 30: 1378-1402. DOI: 10.1177/0278364911415897
[81] Rusu RB, Blodow N, Marton ZC et al. Aligning point cloud views using persistent feature histograms. 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22-26 September 2008. New York, NY: IEEE; 2009. DOI: 10.1109/IROS.2008.4650967
[82] Rusu RB,Blodow N,Beetz M. Fast point feature histograms (FPFH) for 3D registration. 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12-17 May 2009. New York, NY: IEEE; 2009. DOI: 10.1109/ROBOT.2009.5152473
[83] Tombari F, Salti S, Stefano LD. Unique signatures on histograms of local surface description. European Conf Comput Vision, 2010; 6313: 356 -369. DOI: 10.1007/978-3-642-15558-1_26
[84] Guo YL, Sohel F, Bennamoun M et al. Rotational projection statistics for 3D local surface description and object recognition. Int J Comput Vision, 2013; 105: 63-86. DOI: 10.1007/s11263-013-0627-y
Copyright ©2022 The Author(s). This open-access article is licensed under a Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, sharing, adaptation, distribution, and reproduction in any medium, provided the original work is properly cited.


